Гармонические колебания происходят. Возбуждение гармонических механических колебаний
Гармоническое колебание - явление периодического изменения какой-либо величины, при котором зависимость от аргумента имеет характер функции синуса или косинуса. Например, гармонически колеблется величина, изменяющаяся во времени следующим образом:
где х - значение изменяющейся величины, t - время, остальные параметры - постоянные: А - амплитуда колебаний, ω - циклическая частота колебаний, - полная фаза колебаний, - начальная фаза колебаний.
Обобщенное гармоническое колебание в дифференциальном виде
![]()
(Любое нетривиальное решение этого дифференциального уравнения - есть гармоническое колебание с циклической частотой )
Виды колебаний
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание).
Вынужденные колебания совершаются под воздействием внешней периодической силы. Чтобы они были гармоническими, достаточно чтобы колебательная система была линейной (описывалась линейными уравнениями движения), а внешняя сила сама менялась со временем как гармоническое колебание (то есть чтобы зависимость от времени этой силы была синусоидальной).
Уравнение гармонических колебаний
|
Уравнение (1)
|
дает зависимость колеблющейся величины S от времени t; это и есть уравнение свободных гармонических колебаний в явном виде. Однако обычно под уравнением колебаний понимают иную запись этого уравнения, в дифференциальной форме. Возьмем для определенности уравнение (1) в виде
![]()
дважды продифференцируем его по времени:
![]()
![]()
Видно, что выполняется следующее соотношение:
которое и называется уравнением свободных гармонических колебаний (в дифференциальной форме). Уравнение (1) является решением дифференциального уравнения (2). Поскольку уравнение (2) - дифференциальное уравнение второго порядка, необходимы два начальных условия для получения полного решения (то есть определения входящих в уравнение (1) констант A и ); например, положение и скорость колебательной системы при t = 0.
Математи́ческий ма́ятник - осциллятор, представляющий собой механическую систему, состоящую изматериальной точки, находящейся на невесомой нерастяжимой нити или на невесомом стержне в однородном поле сил тяготения. Период малых собственных колебаний математического маятника длины l неподвижно подвешенного в однородном поле тяжести с ускорением свободного падения g равен
и не зависит от амплитуды и массы маятника.
Физический маятник - осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Мы рассмотрели несколько физически совершенно различных систем, и убедились, что уравнения движения приводятся к одной и той же форме
Различия между физическими системами проявляются лишь в различном определении величины и в различном физическом смысле переменной x : это может быть координата, угол, заряд, ток и т. д. Отметим, что при этом, как следует из самой структуры уравнения (1.18), величина всегда имеет размерность обратного времени.
Уравнение (1.18) описывает так называемые гармонические колебания .
Уравнение гармонических колебаний (1.18) является линейным дифференциальным уравнением второго порядка (так как оно содержит вторую производную от переменной x ). Линейность уравнения означает, что
если какая-то функция x(t) является решением этого уравнения, то функция Cx(t) также будет его решением (C – произвольная постоянная);
если функции x 1 (t) и x 2 (t) являются решениями этого уравнения, то их сумма x 1 (t) + x 2 (t) также будет решением того же уравнения.
Доказана также математическая теорема, согласно которой уравнение второго порядка имеет два независимых решения. Все остальные решения, согласно свойствам линейности, могут быть получены как их линейные комбинации. Непосредственным дифференцированием легко проверить, что независимые функции и удовлетворяют уравнению (1.18). Значит, общее решение этого уравнения имеет вид:
где C 1 , C 2 - произвольные постоянные. Это решение может быть представлено и в другом виде. Введем величину
|
|
и определим угол соотношениями:
|
|

Тогда общее решение (1.19) записывается как
Согласно формулам тригонометрии, выражение в скобках равно
Окончательно приходим к общему решению уравнения гармонических колебаний в виде:
Неотрицательная величина A называется амплитудой колебания , - начальной фазой колебания . Весь аргумент косинуса - комбинация - называется фазой колебания .
Выражения (1.19) и (1.23) совершенно эквивалентны, так что мы можем пользоваться любым их них, исходя из соображений простоты. Оба решения являются периодическими функциями времени. Действительно, синус и косинус периодичны с периодом . Поэтому различные состояния системы, совершающей гармонические колебания, повторяются через промежуток времени t* , за который фаза колебания получает приращение, кратное :
Отсюда следует, что
Наименьшее из этих времен
называется периодом колебаний (рис. 1.8), а - его круговой (циклической) частотой .
Рис. 1.8.
Используют также и частоту колебаний
|
|
Соответственно, круговая частота равна числу колебаний за секунд.
Итак, если система в момент времени t характеризуется значением переменной x(t), то, то же самое значение, переменная будет иметь через промежуток времени (рис.1.9), то есть
![]()
Это же значение, естественно, повторится через время 2T , ЗT и т. д.

Рис. 1.9. Период колебаний
В общее решение входят две произвольные постоянные (C 1 , C 2 или A , a ), значения которых должны определяться двумя начальными условиями . Обычно (хотя и не обязательно) их роль играют начальные значения переменной x(0) и ее производной .
Приведем пример. Пусть решение (1.19) уравнения гармонических колебаний описывает движение пружинного маятника. Значения произвольных постоянных зависят от способа, каким мы вывели маятник из состояния равновесия. Например, мы оттянули пружину на расстояние и отпустили шарик без начальной скорости. В этом случае

Подставляя t = 0 в (1.19), находим значение постоянной С 2
![]()
Решение, таким образом, имеет вид:
Скорость груза находим дифференцированием по времени
![]()
Подставляя сюда t = 0, находим постоянную С 1 :
![]()
Окончательно
![]()
Сравнивая с (1.23), находим, что - это амплитуда колебаний, а его начальная фаза равна нулю: .
Выведем теперь маятник из равновесия другим способом. Ударим по грузу, так что он приобретет начальную скорость , но практически не сместится за время удара. Имеем тогда другие начальные условия:

![]()
наше решение имеет вид
![]()
Скорость груза будет изменяться по закону:
![]()
Подставим сюда :
![]()
Гармоническое колебание - колебания, при которых физическая (или любая другая) величина изменяется с течением времени по синусоидальному или косинусоидальному закону. Кинематическое уравнение гармонических колебаний имеет вид
Электронным генератором гармонических колебаний называют устройство, преобразующее энергию источника постоянного тока в энергию электромагнитных колебаний синусоидальной формы требуемой частоты и мощности
Электронные генераторы гармонических колебаний классифицируют по ряду признаков, основными изкоторых являются частота и способ возбуждения. В зависимости от частоты генераторы подразделяют на
· низкочастотные (0,01-100 кГц),
· высокочастотные(0,1-100 МГц) и
· сверхвысокочастотные (свыше100 МГц).
По способу возбуждения различают генераторы
· с независимым внешним возбуждением
· с самовозбуждением. автогенераторы.
Генераторы с независимым внешним возбуждением являются, по существу, усилителями мощности с соответствующим частотным диапазоном, на вход которых подаются электрические сигналы от автогенераторов.
Любой автогенератор электрических колебаний представляет собой
усилитель с положительной обратной связью. (рис. 8.1). 
При ПОС часть выходного напряжения UОС через цепь ПОС поступает на вход усилителя в фазе с входным напряжением, обеспечивающим заданное значение Uвых. Чтобы амплитуда выходного напряжения не изменилась, должно быть выполнено условие Uос=Uвх. Так как Uвх=Uвых/Ku и Uос=βUвых, то из равенства Uос=Uвх следует βUвых=Uвых/Ku, или Kuβ=1. Это уравнение является условием существования в генераторе незатухающих электрических колебаний. Ему соответствуют два уравнения, которые явл.Условиями возникновения гармонич. колебаний
(1) Kuβ=1 (1), отражающее баланс амплитуд в автогенераторе, справедливо для установившегося, или стационарного, режима работы. Уравнение (1) требует от усилителя такого коэффициента усиления, при котором полностью компенсируются потери напряжения, поступающего через цепь ПОС.
При проектировании автогенератора должно быть выполнено условие Kuβ>1. В этом случае при подаче на автогенератор напряжения питания любые сколь угодно малые напряжения на входе будут вызывать возрастающие по амплитуде выходные напряжения. По мере увеличения Uвых вследствие нелинейности амплитудной характеристики усилителя его коэффициент усиления Ки будет уменьшаться, и стационарное состояние установится при В Kuβ=1
(2) φu+φβ=2 n, отражающее баланс фаз, в котором n=0, 1, 2, 3, ... определяет условие, при котором в замкнутой системе (усилитель + цепь ПОС) обеспечивается ПОС.
Цепи положительной обратной связи выполняют две функции: сдвиг сигнала по фазе для получения петлевого сдвига близкого к n*2π и фильтра, пропускающего нужную частоту. Функции сдвига фазы и фильтра могут быть распределены на две составные части генератора - на усилитель и на цепи положительной обратной связи или целиком возложены на цепи положительной обратной связи. В цепи положительной обратной связи могут стоять усилители.
Для получения синусоидального выходного напряжения необходимо, чтобы условия (1) и (2) выполнялись только для некоторой одной частоты. С этой целью цепь ПОС должна обладать избирательными свойствами. Такие свойства, как известно, имеют параллельный колебательный LC-контур (последовательный контур применяется очень редко) и RС-цепи.
Электронные генераторы гармонических колебаний нашли широкое применение в промышленной электронике. Эти функциональные устройства являются одной из составных частей измерительных приборов и автоматических систем.
Далеко не полный список устройств, в которых применяются генераторы сигналов:
· Устройства связи - радиоприемники, телевизионные приемники, мобильные телефоны,приёмопередатчики, аппаратура передачи данных и др.
· Измерительные приборы - осциллографы, измерительные вольтметры, амперметры и др.
· Медицинское оборудование - электрокардиографы, томографы, рентгенографы, электронные тонометры, аппараты для ультразвукового исследования (УЗИ), физиотерапевтические приборы и др.
· эхолоты.
· Бытовая техника - программируемые стиральные машины, СВЧ-печи, посудомоечные машины и др.
Интегральная микросхема
Твердотельная интегральная микросхема - это законченный функциональный электронный узел, элементы которого конструктивно не разделены и изготавливаются в едином технологическом процессе, в объеме и на поверхности полупроводникового кристалла.
Типичная ИС состоит из множества соединенных между собой микроэлектронных компонентов, таких, как транзисторы, резисторы, конденсаторы и диоды, изготовленные в поверхностном слое кристалла.
По конструктивно-технологическому исполнению микросхемы делятся наполупроводниковые и гибридно-пленочные. Полупроводниковые микросхемы имеют в своей основе монокристалл полупроводникового материала (обычно кремния), в поверхностном слое которого методами литографии и избирательного легирования создаются транзисторы, диоды, резисторы и (иногда) конденсаторы, а соединения между ними формируются по поверхности кристалла с помощьютонкоплёночной технологии. Полупроводниковые микросхемы могут бытьоднокристальными (монолитными) и многокристальными (микросборками). Однокристальная микросхема может иметь индивидуальный герметизированный корпус с внешними выводами для монтажа на коммутационной (печатной) плате, или быть бескорпусной и входить в состав микросборки.
Многокристальная микросхема (микросборка) представляет собой совокупность бескорпусных микросхем, смонтированных на общей коммутационной плате. В качестве компонентов в микросборке могут присутствовать бескорпусные согласующие резисторы и развязывающие конденсаторы. Вследствие высокой насыщенности связей коммутационная плата выполняется многоуровневой и, таким образом, является миниатюрным аналогом многослойной печатной платы. При изготовлении коммутационной платы может быть использована как тонкоплёночная, так и толстоплёночная технологии.
Гибридно-плёночные микросхемы включают в себя плёночные пассивные элементы (резисторы и конденсаторы), коммутационные проводники, нанесённые непосредственно на подложку из изоляционного материала, и бескорпусные полупроводниковые кристаллы (транзисторы, диоды, диодные матрицы, несложные микросхемы), монтируемые на той же подложке. Пассивные элементы и проводники могут быть выполнены по тонкоплёночной или толстоплёночной технологии.
В качестве активных элементов в полупроводниковых микросхемах используютсяуниполярные (полевые) транзисторы со структурой “металл – диэлектрик (оксид) – полупроводник” (МДП- или МОП-транзисторы) и биполярные транзисторы. В соответствии с этим все полупроводниковые микросхемы делятся на три основные вида: биполярные, униполярные (МДП или МОП) и биполярно-полевые.
Число элементов в интегральной микросхеме характеризует ее степень интеграции.
· малая интегральная схема (МИС) - до 100 элементов в кристалле,
· средняя интегральная схема (СИС) - до 1000 элементов в кристалле,
· большая интегральная схема (БИС) - до 10 тыс. элементов в кристалле,
· сверхбольшая интегральная схема (СБИС) - более 10 тыс. элементов в кристалле.
Интегральные микросхемы в зависимости от функционального предназначения делятся на - аналоговые и цифровые .
· Аналоговые интегральные микросхемы (АИМС) предназначены для преобразования и обработки сигналов, непрерывно изменяющихся по уровню и во времени. Они широко применяются в аппаратуре звуковоспроизведения и звукоусиления, радиоприемниках и телевизорах
· цифровые микросхемы предназначены для выполнения определенных логических действий над входными сигналами. Основу работы цифровых микросхем составляет двоичная система счисления. 0,1
Процесс создания полупроводниковой микросхемы сводится к формированию в приповерхностном слое полупроводниковой пластины элементов (транзисторов, диодов, резисторов) и к последующему их объединению в функциональную схему пленочными проводниками по поверхности пластины (межсоединения).
При изготовлении микросхем используется метод фотолитографии (проекционной, контактной и др.), при этом схему формируют на подложке (обычно из кремния), полученной путём резки алмазными дисками монокристаллов кремния на тонкие пластины. Ввиду малости линейных размеров элементов микросхем, от использования видимого света и даже ближнегоультрафиолета при засветке отказались.
В качестве характеристики технологического процесса производства микросхем указывают минимальные контролируемые размеры топологии фотоповторителя (контактные окна в оксиде кремния, ширина затворов в транзисторах и т. д.) и, как следствие, размеры транзисторов (и других элементов) на кристалле. Этот параметр, однако, находится во взаимозависимости с рядом других производственных возможностей: чистотой получаемого кремния, характеристиками инжекторов, методами фотолитографии, методами вытравливания и напыления.
Интегральные схемы обладают целым рядом преимуществ перед своими предшественниками – схемами, которые собирались из отдельных компонентов, ИС имеют меньшие размеры, более высокие быстродействие и надежность; они, кроме того, дешевле и в меньшей степени подвержены отказам, вызываемым воздействиями вибраций, влаги и старения.
Темы кодификатора ЕГЭ: гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания - это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания - это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия - это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание . Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела - это величина его наибольшего отклонения от положения равновесия.
Период колебаний - это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний - это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них - синус и косинус - являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания - это колебания, при которых координата зависит от времени по гармоническому закону:
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому - амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой . Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
(2)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
. (4)
Теперь дифференцируем полученное равенство (4) :
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
. (6)
Это соотношение называется уравнением гармонических колебаний . Его можно переписать и в таком виде:
. (7)
C математической точки зрения уравнение (7)
является дифференциальным уравнением
. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
Решением уравнения (7) является всякая функция вида (1) с произвольными ;
Никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий - по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
. (9)
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
Математический маятник.
Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это - уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
. (12)
Отсюда период колебаний математического маятника:
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания
, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
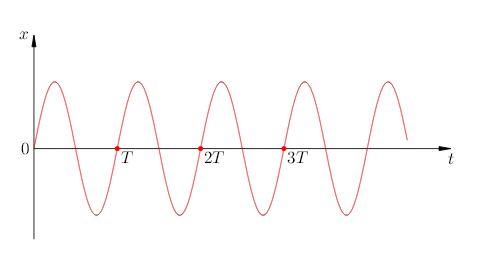
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Вынужденные колебания - это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
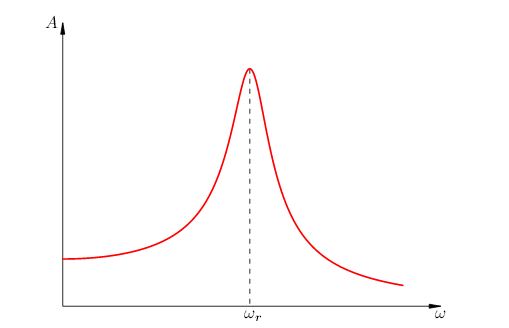 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты наступает резонанс - явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .